
Sfoglia il codice sorgente
Improve pseudocode
 Martin Thoma
Martin Thoma
10 ha cambiato i file con 11 aggiunte e 10 eliminazioni
BIN
source-code/Pseudocode/Policy-Iteration/Policy-Iteration.png
{kind=link}

+ 3
- 2
source-code/Pseudocode/Policy-Iteration/Policy-Iteration.tex
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
source-code/Pseudocode/Value-Iteration/Value-Iteration.png
{kind=link}

+ 1
- 1
source-code/Pseudocode/Value-Iteration/Value-Iteration.tex
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
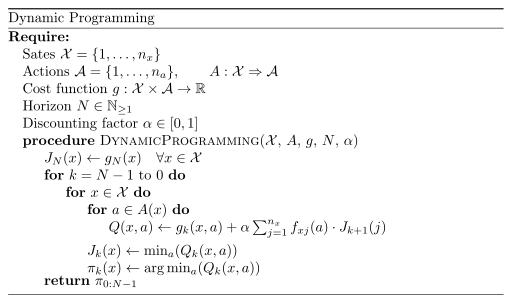
source-code/Pseudocode/dynamic-programming/dynamic-programming.png
{kind=link}
+ 3
- 2
source-code/Pseudocode/dynamic-programming/dynamic-programming.tex
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
source-code/Pseudocode/label-correction/label-correction.png
{kind=link}

+ 3
- 4
source-code/Pseudocode/label-correction/label-correction.tex
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
source-code/Pseudocode/q-learning/q-learning.png
{kind=link}

+ 1
- 1
source-code/Pseudocode/q-learning/q-learning.tex
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||